2016年12月04日
12/2晩、系外星雲M33(続AVX試運転3)@自宅
続、AVX赤道儀試運転その3>導入補正精度と自動追尾修正↓さんかく座のM33↓

↓同、少し処理を変えたもの↓

たった3回の試運転で何を言うか!と言われたらそれまでだが、、
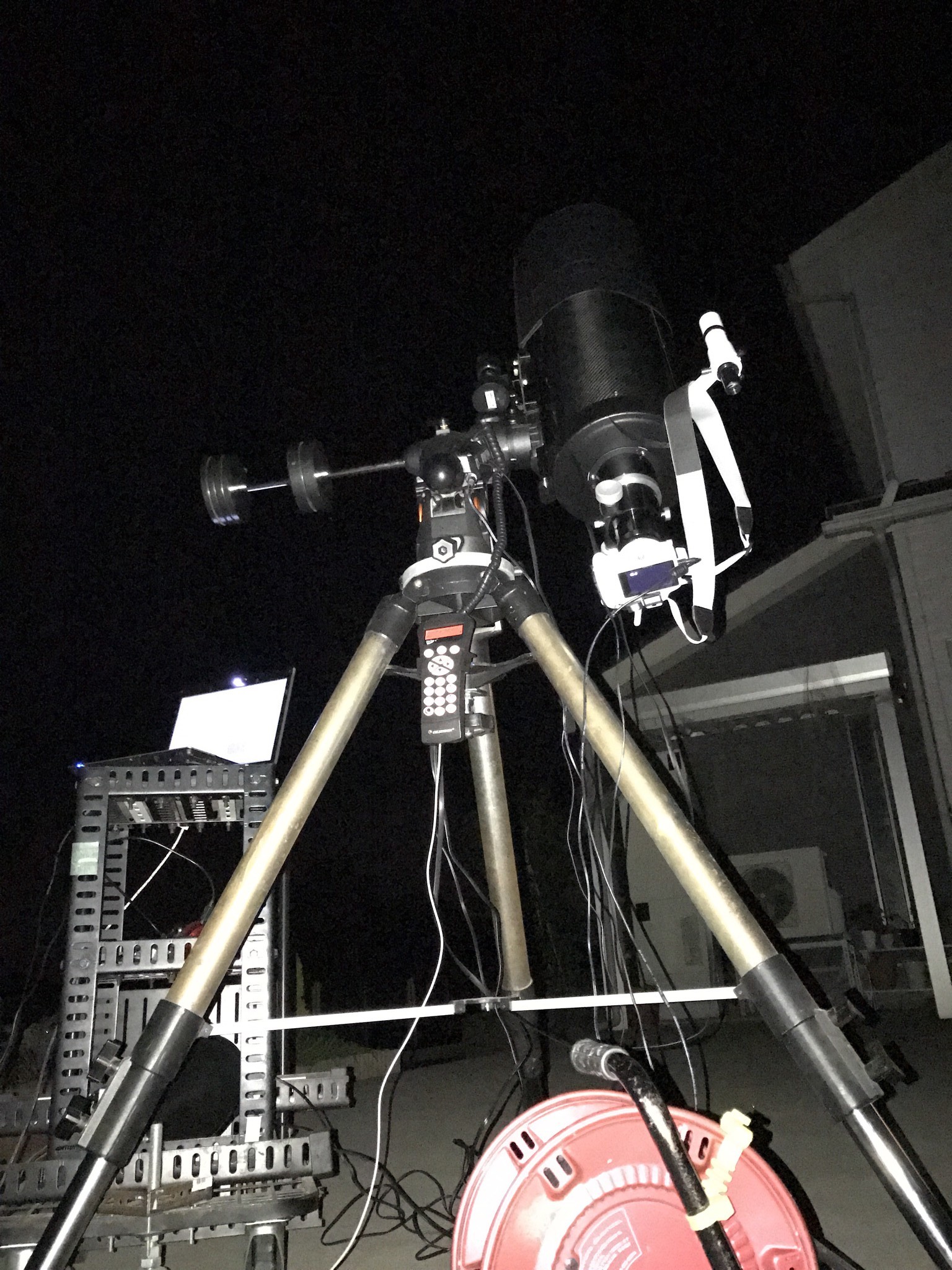
【自動導入&導入補正精度】ステラショットでちゃんと自動導入&導入補正する。但し、精度は今一つ。ステッピングモーターでないもの同士ではLX200の方が上。モーターは力強く回転する(音が気になるので全速の半分ほどに落としている)が、すぐ近くの恒星からの導入や導入補正をかけたとき、近くからでもいったんグイっとモーターを回し、行き過ぎた分を低速度で戻すが、行き過ぎる量が多過ぎるようだ。LX200も同じように行き過ぎる分は戻すが、目標近くからの導入であればAVXよりもモータ速度を落としている。逆に言えばAVXのモーターはパワフル過ぎるのだろう。なので、導入補正精度は合格点といったところ。いずれにせよ、なるべく目標に近い星を導入しておいてから動かした方がよい。1000mmを超す直焦点では少し気になる。
【自動追尾修正】今のところ特に問題を感じない。ガイド鏡筒などは1000mm超直焦点でも過度に大きなものは不要。オートガイドは微妙なバランスの崩れが原因であることが多いと思う。(クランプフリー状態で赤道儀のRA及びDECモーター粗動させても望遠鏡が動くことが目安)
【データ】系外星雲M33/2016年12月2日20時03分〜(2分露光×17枚スタック)/EOSkissX7改(ISO1600,RAW)/GS200RC+0.75RC(fl=1200mm)直焦点/AVX赤道儀+MGEN100ガイド@自宅前
==================================================================================================
 HomePage(Nifty)/(NSK)/すたーりぃないとハナのWeb天文台/はなのWeb天文台/
HomePage(Nifty)/(NSK)/すたーりぃないとハナのWeb天文台/はなのWeb天文台/

↓同、少し処理を変えたもの↓
たった3回の試運転で何を言うか!と言われたらそれまでだが、、
【自動導入&導入補正精度】ステラショットでちゃんと自動導入&導入補正する。但し、精度は今一つ。ステッピングモーターでないもの同士ではLX200の方が上。モーターは力強く回転する(音が気になるので全速の半分ほどに落としている)が、すぐ近くの恒星からの導入や導入補正をかけたとき、近くからでもいったんグイっとモーターを回し、行き過ぎた分を低速度で戻すが、行き過ぎる量が多過ぎるようだ。LX200も同じように行き過ぎる分は戻すが、目標近くからの導入であればAVXよりもモータ速度を落としている。逆に言えばAVXのモーターはパワフル過ぎるのだろう。なので、導入補正精度は合格点といったところ。いずれにせよ、なるべく目標に近い星を導入しておいてから動かした方がよい。1000mmを超す直焦点では少し気になる。
【自動追尾修正】今のところ特に問題を感じない。ガイド鏡筒などは1000mm超直焦点でも過度に大きなものは不要。オートガイドは微妙なバランスの崩れが原因であることが多いと思う。(クランプフリー状態で赤道儀のRA及びDECモーター粗動させても望遠鏡が動くことが目安)
【データ】系外星雲M33/2016年12月2日20時03分〜(2分露光×17枚スタック)/EOSkissX7改(ISO1600,RAW)/GS200RC+0.75RC(fl=1200mm)直焦点/AVX赤道儀+MGEN100ガイド@自宅前
==================================================================================================
投稿者:龍吉at 12:31| 星雲・星団 | コメント(0)